この機材の一番のメリットはこれだけの機能を持ちながら、非常に軽量なことだと考えています。まだまだ進化していく印象です。
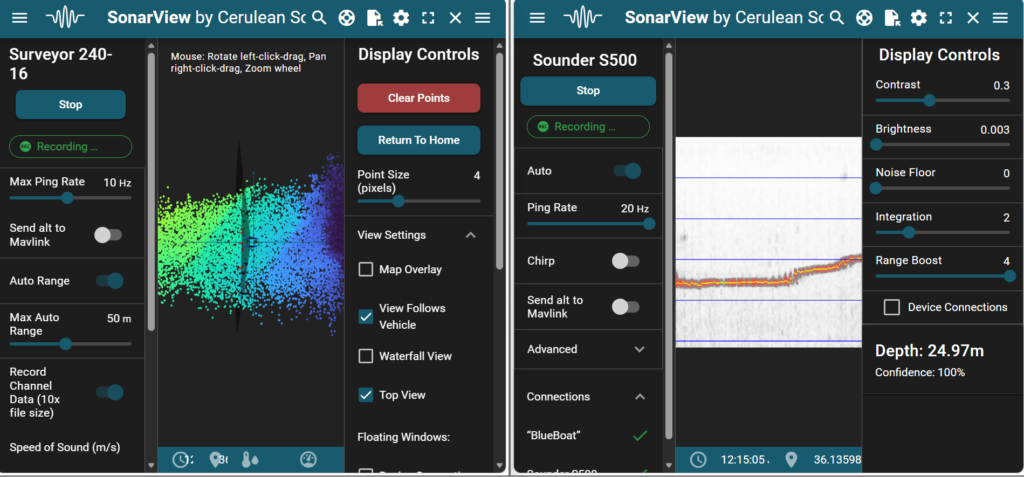
〇測深用ソナーを刷新し、マルチビームとシングルビームで同時観測が可能です。
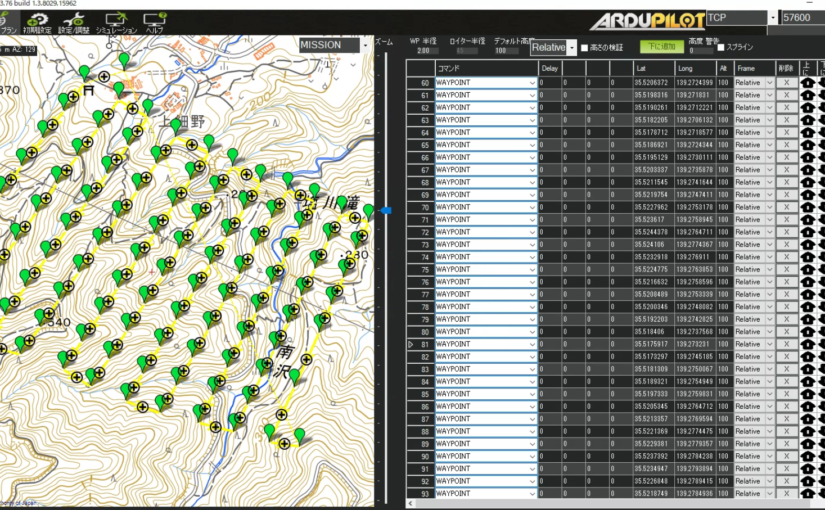
〇ネットワーク型RTK対応※以前はCLASのみ。
〇MBES用解析ソフトウェアを導入し、適切な深度校正が可能となり、公共測量対応可能です。
〇自作音速度計により、水深ごとの音速度のプロファイル取得が可能です。
〇来月DVLも搭載する予定です。デットレコニング(GNSSが入らない場所での自己位置推定)を期待しています。